

Challenges in part scanning
The physical alignment between a part to be scanned and the scanning hardware on a robot end effector is never perfect. This fact can lead to calculation errors if left unchecked. A simple three-dimensional movement from point A to Point B can introduce high levels of calculation complexity. Autonetics overcomes this by applying externally guided motion path correction for robot paths during part scans. This allows the use of a laser sensor to guide the robot along a corrected path. However, deconstructing the geometry of every part and sensor combination will bog down the development of part scanning software applications. This leads to the need for a generalized method of path correction that can be applied to any part and sensor combination.
Formulation of objectives
To create a generalized path correction process, the absolute position of the sensor must be known in the work object coordinate system. This position must be compared to a predetermined path position and the error calculated. Once this error is known a new path geometry is defined and fed to the robot.
Calculation of absolute sensor position
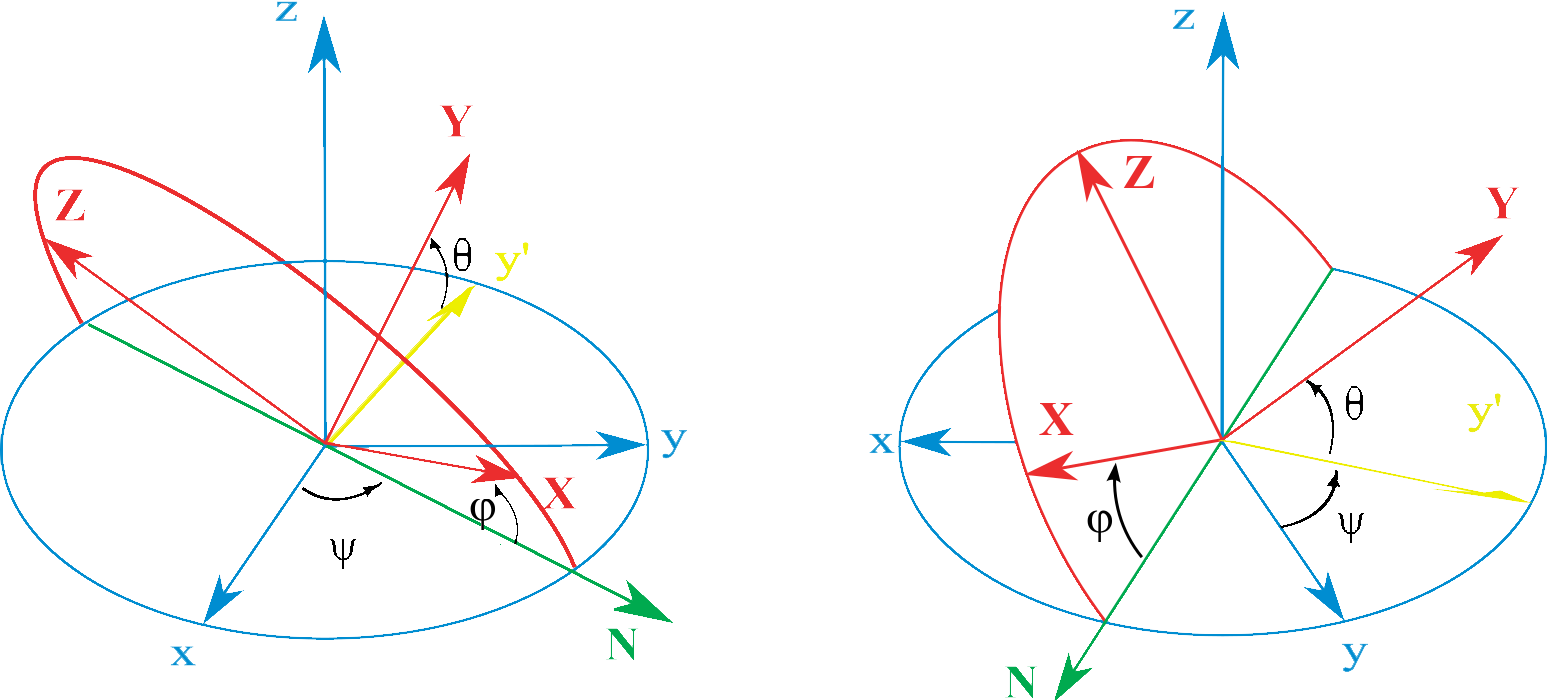
The sensor on the robot end effector both translates and rotates as it moves. The position reading given by the laser sensor defines the path error. To express this error in the work object coordinate system, all degrees of freedom of the sensor must be defined with respect to the work object coordinate system. This is achieved using extrinsic Tait-Bryan angles. The angles can be pulled from the robots’ position data and used as the basis for a coordinate transformation of the sensor data.
Applications of Generalized Path Correction
The use of Tait-Bryan angles to create a generalized path correction allows calculations to be done on any three-dimensional path, on any shaped part (measurable by a given sensor). The calculation technique allows rapid development of path geometry for new parts. This is because the generalized path corrections are not tied to any set of geometric constraints, other than those defined by the given sensor being used. Solutions like this allow Autonetics to provide customers with shorter lead times on software delivery. In addition to reduced lead times, it increases Autonetics’ capability to handle parts with complex or irregular geometry, all while maintaining a high degree of precision and repeatability in part scans.
Autonetics Metrology
Tomorrow's technology today.